코딩 교육 소개 영상
이 영상처럼, 아이들에게 코딩을 통한 논리적 사고 능력, 창의력을 키워주고 싶은 데, 방법이 마땅이 떠오르지 않는 경우가 있습니다. 이럴때 학원을 알아보는 경우가 많죠. 사실, 학원도 좋은 방법 중 하나라 생각합니다. 체계적이고 빠른 시간내 무언가를 얻을 수 있습니다. 다만, 비싸고, 지속적인 비용이 들며, 생활과는 분리되어 있죠.
여기서는 생활 속에서 코딩을 저렴하게 체험하고, 가족들과 쉽게 놀 수 있는 몇가지 방법과 교구들을 알아보겠습니다.
1. 몸으로 체험하는 5세 이상 어린이 코딩교구 언플러그드(Unplugged)
몸으로 체험할 수 있도록, 종이, 컵, 색연필 등을 이용해, 코딩을 체험할 수 있는 교구입니다. 컴퓨터 공학의 이론적인 내용들을 모두 몸으로 체험할 수 있도록 교재들을 만들어 놓았기 때문에, 비싼 교구 없이도 아이들에게 코딩 교육을 시켜줄 수 있습니다. 종이, 색연필, 풀, 가위만 있어도 되죠. 필요한 것은 부모님의 열정과 시간입니다.
언플러그드 교구는 주변에서 활용할 수 있는 것들을 사용하기 때문에 누구나 쉽게 체험할 수 있습니다.
언플러그드는 Tim Bell 교수가 만들었으며, http://computingunplugged.org/activities를 방문하시면, 많은 교구와 체험 방법을 무료로 사용할 수 있습니다.
참고로, 한글 교재를 http://www.playsw.or.kr/repo/material 에서 배포하고 있습니다.
스타트업으로 통해 창업한 테크에듀 회사인 Primo Toys의 코딩 교구입니다. 직접 텍스트 방식으로 코딩하지 않아도, 코딩을 통해 논리적 사고력을 키울 수 있도록 되어 있습니다.
로봇을 이동하는 명령 블럭과 함수 블럭을 제공해 다양한 로봇의 움직임을 코딩으로 구현할 수 있습니다.
큐브토 코딩 방식
가격은 225달러이며, 인터넷을 통해 판매하고 있습니다.
3. 5세 이상 어린이와 어른을 위한 전자회로 교구 리틀비츠(little bits)
리틀비츠는 전자회로 교구입니다. 전자회로의 원리를 전혀 몰라도, 납땜이 필요없이, 쉽게 전자회로를 만들고, 재미있는 것들을 만들 수 있는 제품입니다. 마치, 레고블럭 조립하듯이 재미있는 것을 만들 수 있죠.
리틀비츠의 전자회로는 레고블럭 하나에 모터나 LED 등이 하나 붙어 있는 형태로, 각 블럭은 자석이 붙어 있서, 자석으로 블럭이 쉽게 붙게 되어 있습니다. 이때, 회로 연결이 되는 방식이죠. 납땜이 필요없습니다. 그래서, 4~5세 정도 되는 어린이들도 쉽게 전자회로를 만들 수 있습니다. 이런 이유로 교육 용으로 많이 사용되고 있습니다.
리틀비트로 만드는 전자회로 프로젝트
가격은 GIZMOS세트가 199.95 달러입니다. 좀 더 자세한 내용은 아래 링크를 참고하시길 바랍니다.
4. 어린이 코딩을 위한 CODE.ORG
CODE.ORG는 코딩 민주화를 위해, 웹사이트에서 접속해서 무료로 코딩을 배울 수 있는 오픈소스 기반 코딩 학습 기부 조직입니다. 다양한 방식의 교구, 튜토리얼 동영상, 교재가 무료로 공유되어 있습니다.
CODE.ORG는 오픈소스 기반이며, 인터넷에서 무료로 코딩을 할 수 있는 거의 모든 교구들을 망라하고 있습니다.


마인크래프트 게임 기반 코딩 (code.org)
대부분의 코딩 교육은 스크래치와 같은 명령 블럭을 조립하거나, 간단한 명령 텍스트를 이용해 학습할 수 있도록 되어 있으며, 코딩한 코드 실행 결과를 화면에서 게임, 그래픽, 소리 등으로 바로 알 수 있도록 되어 있습니다.
5. 어린이 코딩을 위한 스크래치와 엔트리
스크래치는 MIT에서 개발한 오픈소스 기반 코딩 교구로 어린이가 코딩하여, 게임이나, 아두이노와 같은 피지컬 컴퓨팅을 만들 수 있도록 지원해 주는 SW입니다. 오픈소스로 개발되었기 때문에, 이를 바탕으로 유사한 다양한 코딩 교구 SW가 개발되었으며, 코딩 교육에 큰 영향을 주었습니다.
인터넷에 스크래치와 관련된 수많은 튜토리얼이 있습니다.
스크래치 튜토리얼 영상
국내에서는 스크래치 기반으로 개발된 엔트리가 있습니다. 사용 방법은 거의 동일합니다.
최근에는 스크래치를 이용해, 드론에 명령을 내리는 사례까지 나왔습니다.
스크래치 기반 드론 제어
가격은 무료입니다.
6. 어린이도 손쉽게 만드는 스마트 폰 앱 - 앱 인벤터
앱 인벤터(App inventor)는 MIT에서 개발한 오픈소스 기반 무료 앱 프로그램 개발 도구로, 인터넷 상에서 앱을 디자인하고 코딩한 후, 본인의 휴대폰에 손쉽게 올릴 수 있습니다. 게임 등 다양한 앱을 만들 수 있고, 관련된 많은 튜토리얼들을 제공합니다.
- MIT App Inventor 홈페이지
앱 인벤터 튜토리얼 (MIT App Inventor 유튜브 채널)
만드는 방법은 스크래치와 매우 유사합니다. 어린이도 몇번의 클릭만으로 스마트 폰 앱을 만들 수 있지요. 앱 코딩 순서는
1. http://ai2.appinventor.mit.edu/ 사이트 접속
2. 팔레트를 이용해 앱 디자인
3. 명령 블록을 이용한 스크래치 코딩
4. 빌드 후 QR코드 링크 생성
5. QR코드 링크로 부터 스마트 폰 앱 설치

팔레트를 이용한 앱 디자인

블록 코딩 모습


앱 빌드 메뉴 실행 후 생성된 QR코드 링크 (QR코드 리더 앱을 이용해 설치할 수 있다)

QR코드 링크로 부터 앱을 설치한 후 스마트 패드에서 실행된 모습
개발된 앱은 안드로이드 앱이 호환되는 스마트 폰이나 스마트 패드에서 실행될 수 있습니다.
7. 가상현실 게임 만들기 - CoSpace
CoSpace는 가상현실 공간을 만드는 도구로 무료입니다. 스크래치와 비슷한 블록 코딩 언어를 이용해, 가상의 공간에서 객체를 만들고, 이벤트에 따라 동작하는 게임을 만들 수 있습니다.
CoSpace의 블록 코딩은 Blocky를 이용합니다. 단순히, 객체를 선택하고, 이름(Tag)를 짓고, 이벤트가 발생하면, 객체를 움직이는 식의 명령 블록을 이용해 쉽게 인터렉티브한 가상공간을 만들 수 있습니다.
CoSpace의 Blocky를 이용한 코딩
또한, VR, 360 파노라마 뷰 등 다양한 기능이 있어, Google Cardboard와 같은 저렴한 가상현실 헤드셋마운트를 이용해, VR을 체험할 수 있습니다.

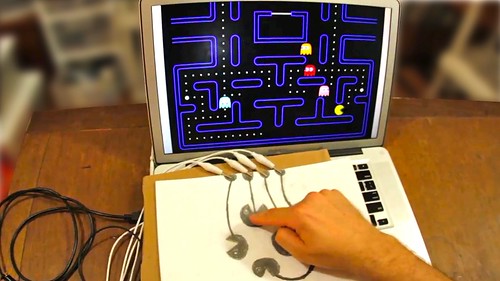
모든 만물을 스위치처럼. 메이키 메이키
종이에 그리는 전자 회로 Circuit Scribe
아두이노 등을 이용해, 피지컬 컴퓨팅을 할 때, 회로도를 그려야할 때가 있습니다. 이때 Fritzing 프로그램을 사용하면, 편리하게 회로 디자인 할 수 있습니다. 디자인된 회로는 PCB(printed circuit board. 인쇄회로기판)로 만들 수 있습니다.
전자회로를 만들고, 전원이 연결되었을 때 시뮬레이션을 미리 해보는 프로그램도 있습니다. Autodesk에서 서비스하는 https://circuits.io/ 은 아두이노와 같은 소형 임베디드 컴퓨터의 코드까지도 가상으로 실행하여, 연결된 전자회로를 시뮬레이션할 수 있습니다. 아울러, 유명한 전자회로나 키트를 지원하고, 만든 것을 공유할 수 있어 사용이 편리합니다.

이외에도 전자회로 디자인과 시뮬레이션을 지원하는 DCACLAB (https://dcaclab.com/ko/home) 가 있습니다. 이 프로그램은 전류의 흐름 등 전자회로 동작을 좀 더 직관적으로 보여줍니다.

이외, 아래와 같은 어린이를 위한 무료 코딩 도구 레퍼런스를 참고하시길 바랍니다.
이런 교구들은 부모님들이 잘 활용한다면, 충분히 저렴하며, 지속적이고, 재미있는 것들을 만들 수 있습니다. 아울러, 이런 교구들이 오픈소스를 바탕으로 한 것이 많아, 많은 튜토리얼과 동작 방식을 얻을 수 있습니다.
다만, 이런 교구들을 사 놓고, 장난감처럼 아이들에게 던져 주기만 하면, 집에서 코딩 교육은 지속되기 어려울 것입니다. 몇번 재미있게 하다가 일주일 지나면 지루해져서, 장난감 상자에 던져 버리겠죠.
사실 교육은 놀이부터 시작된다고 생각합니다. 부모님이 지속적으로 아이에게 관심을 가져주고, 코딩 놀이와 교육에 함께 참여하고, 커뮤니티에 참여해 아이들이 서로 어울릴 수 있도록 노력하는 것이 매우 중요할 것입니다.