
SFM기반 3차원 모델 생성(OpenMVG)
SFM을 이용해, 각 촬영 이미지의 고유한 특징점(feature point)를 얻고, 각 촬영 장면마다 특징점들과의 관계를 서로 매칭하고 계산해 카메라의 위치를 얻을 수 있다.
SFM을 사용하는 무료 프로그램 중 하나는 VisualSFM이다. 앞서 언급한 기능을 지원한다. 이 글에서는 직접 API(Application Program Interface)수준에서 프로그램을 만들고, 알고리즘을 리비전할 수 있는 OpenMVG를 사용해 본다. 참고로, 이와 유사한 Mapillary에서 개발된 OpenSFM도 있으나, 복잡한 디펜던시를 고려해 이 글에서는 언급하지 않는다. OpenSFM을 사용하려면 Docker 방식으로 이용하길 권장한다.
OpenSFM
OpenMVG 빌드 및 테스트를 위해 다음 링크를 방문해 관련 명령을 그대로 따라한다. 참고로, 개발 환경은 우분투 18.04에서 진행하였다.
github에서 소스코드를 다운로드 받고, 패키지를 설치한 후, 빌드한다.
git clone --recursive https://github.com/openMVG/openMVG.git
sudo apt-get install libpng-dev libjpeg-dev libtiff-dev libxxf86vm1 libxxf86vm-dev libxi-dev libxrandr-dev
sudo apt-get install graphviz
mkdir openMVG_Build && cd openMVG_Build
..
cmake -DCMAKE_BUILD_TYPE=RELEASE -DOpenMVG_BUILD_TESTS=ON ../openMVG/src/
cmake -DCMAKE_BUILD_TYPE=RELEASE -DOpenMVG_BUILD_TESTS=ON ../openMVG/src/
cmake --build . --target install
make test
단위 테스트를 실행한 후, 다음과 같은 화면을 확인하면 성공한 것이다.
ctest --output-on-failure -j

각 단위 테스트는 SFM, SIFT (Scale Invariant Feature Transform) 등 예제를 포함한 API 호출 및 프로그램 실행 성공 결과를 보여준다.
참고로, OpenMVG는 다음 명령을 이용해 도커에서 실행할 수도 있다.
git clone --recursive https://github.com/openMVG/openMVG.git
docker build . -t openmvg
docker run -it openmvg /bin/sh
MVG 테스트해보기
테스트를 위해 다음 폴더에서 데모를 실행해 본다.
openMVG_Build/software/SfM/tutorial_demo.py





CloudCompare 및 MeshLab으로 생성된 PLY파일을 확인하면 다음과 같다.


이제 다음과 같이 실행해 본다.
python SfM_SequentialPipeline.py ./ImageDataset_SceauxCastle/images ./ImageDataset_SceauxCastle/Castle_Incremental_Reconstruction

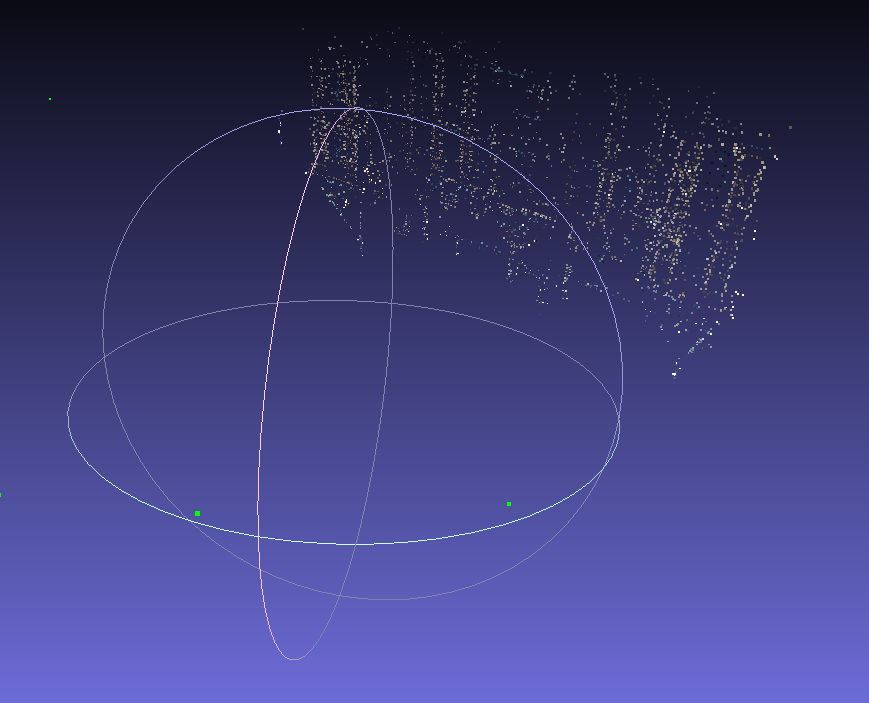
생성된 SFM 포인트 클라우드 결과물은 다음과 같다. Sparse Point Cloud로 생성된 결과를 확인할 수 있다.





밀집 포인트 클라우드 생성
밀집된 포인트 클라우드(dense point cloud reconstruction)를 생성하려면 OpenMVS를 사용한다. 관련해 다음 링크를 참고한다.
OpenMVS를 빌드하기 위해, 다음과 같이 소스코드를 다운로드 받고, 관련 패키지를 설치한 후, 빌드한다.
#Prepare and empty machine for building:
sudo apt-get update -qq && sudo apt-get install -qq
sudo apt-get -y install build-essential git mercurial cmake libpng-dev libjpeg-dev libtiff-dev libglu1-mesa-dev libxmu-dev libxi-dev
main_path=`pwd`
#Eigen (Required)
hg clone https://bitbucket.org/eigen/eigen#3.2
mkdir eigen_build && cd eigen_build
cmake . ../eigen
make && sudo make install
cd ..
#Boost (Required)
sudo apt-get -y install libboost-iostreams-dev libboost-program-options-dev libboost-system-dev libboost-serialization-dev
#OpenCV (Required)
sudo apt-get -y install libopencv-dev
#CGAL (Required)
sudo apt-get -y install libcgal-dev libcgal-qt5-dev
#VCGLib (Required)
git clone https://github.com/cdcseacave/VCG.git vcglib
#Ceres (Required)
sudo apt-get -y install libatlas-base-dev libsuitesparse-dev
git clone https://ceres-solver.googlesource.com/ceres-solver ceres-solver
mkdir ceres_build && cd ceres_build
cmake . ../ceres-solver/ -DMINIGLOG=ON -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF
make -j2 && sudo make install
cd ..
#GLFW3 (Optional)
sudo apt-get -y install freeglut3-dev libglew-dev libglfw3-dev
#OpenMVS. 다음 main_path는 현재 폴더가 설정되므로, 빌드 에러가 날 경우 적절히 수정해야 함.
git clone https://github.com/cdcseacave/openMVS.git openMVS
mkdir openMVS_build && cd openMVS_build
cmake . ../openMVS -DCMAKE_BUILD_TYPE=Release -DVCG_ROOT="$main_path/vcglib"
#If you want to use OpenMVS as shared library, add to the CMake command:
-DBUILD_SHARED_LIBS=ON
#Install OpenMVS library (optional):
make -j2 && sudo make install
이제 Sample 폴더를 다운로드 받는다.
git clone https://github.com/cdcseacave/openMVS_sample
이 링크를 참고하여 다음 명령을 실행해, 입력된 이미지가 처리된 밀집 포인트 클라우드를 생성한다.
python MvgMvs_Pipeline.py ./images ./output_mvgmvs
참고로, 그냥 MvgMvs_Pipeline.py 소스를 실행하면, 문법 에러가 발생한다. 문법 에러를 수정한 후 다음과 같이 경로등이 포함된 코드를 적절히 수정한다.
# Indicate the openMVG and openMVS binary directories
OPENMVG_BIN = "/usr/local/bin/"
OPENMVS_BIN = "/usr/local/bin/OpenMVS/"
# Indicate the openMVG camera sensor width directory
CAMERA_SENSOR_WIDTH_DIRECTORY = "/home/ktw/project/openMVG/src/openMVG/exif/sensor_width_database"









SFM 처리 시 문제 해결
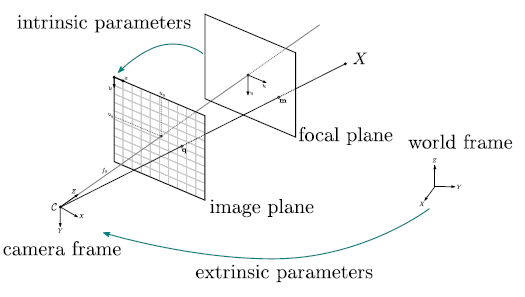
Focal length 이슈
카메라 focal 값은 카메라 종류별로 차이가 있다. sensor_width_database 파일에 해당 카메라가 등록되어 있지 않거나, 촬영된 이미지의 EXIF 메타 데이터가 없을 경우, SFM를 위한 정보를 제대로 계산하지 못한다. 이 경우, 다음과 같이 잘못된 포인트 클라우드가 생성된다.

이런 경우, 입력할 이미지 촬영에 사용된 카메라의 포컬(focal) 길이를 MvgMvs_Pipeline.py 에 지정해야 한다(참고 - calculate focal length, uncalibrated image issue). 이런 경우, 다음과 같이 MvgMvs_Pipeline.py 소스안에 해당 부분에 -f옵션으로 focal length 값을 수정한다.
[ "Intrinsics analysis",
os.path.join(OPENMVG_BIN,"openMVG_main_SfMInit_ImageListing"),
["-i", "%input_dir%", "-f", "586.3", "-o", "%matches_dir%", "-d", "%camera_file_params%"] ],
앞의 -f 옵션은 단순히 focal length가 아닌 픽셀 단위의 focal length이다. 그래서, 다음과 같은 수식으로 계산해서 입력해야 한다.
참고로, iPhone 8의 경우, focal 값은 다음과 같다.



이 경우, 계산된 focal length in pixel 값은 3351.6이다. 이 값을 앞의 -f 옵션값으로 하면 된다. 보통 고프로, 소니, 캐논 같은 유명 메이커 카메라는 sensor_width_database 에 등록되어 있어 -f 값을 안줘도 된다.
CUDA 메모리 할당 에러
과대한 포인트 클라우드 생성으로 다음과 같이 CUDA 메모리 할당 에러가 발생할 수 있다(MVG GPU issue, RefineMesh --use-cuda 0 option).

다양한 카메라 이미지 테스트 결과 분석
처리 시간은 수 분정도 밖에 걸리지 않았다. 결과는 다음과 같다.





















밀집 포인트 클라우드를 CloudCompare로 다음과 같이 확인해 보았다.









그림과 같이 출력된 결과 품질은 좋은 수준이다.
참고로, SFM는 각 프로세스를 개별적으로 실행할 수도 있다.
SFM 도커 이미지 사용
도커가 설치되어 있다면, 앞에서 작업한 소스코드 빌드 등 복잡한 내용을 생략할 수 있다. 다음과 같이 Mappilary의 OpenSFM를 Docker에서 실행해 사용할 수도 있다.
sudo docker pull freakthemighty/opensfm
sudo docker images
sudo docker run -i -t -d -p 8080:8000 -v ~/project/docker:/mnt/common freakthemighty/opensfm /bin/bash

주의사항
촬영한 이미지의 카메라 정보가 아래 파일에 포함되어 있지 않으면 에러가 발생할 수 있다. 이 경우, 관련 메타정보를 추가해 줘야 한다.
/openMVG/src/openMVG/exif/sensor_width_database
실행파일과 파이썬에서 실행할 때 디펜던시 문제로 버전 불일치 문제가 발생하는 경우가 있다. 특히, 아나콘다를 설치하고, 실행파일과 파이썬 실행 환경이 서로 다르게 링크될 때 문제가 발생할 수 있다.
Appendix - CGAL, BREAKPAD CMake error
Open CMakeLists.txt
OpenMVS_USE_BREAKPAD:BOOL=OFF
CGAL_DIR:PATH=/usr
레퍼런스
좀 더 상세한 내용은 다음을 참고 한다.
git clone --recursive https://github.com/openMVG/openMVG.git
docker build . -t openmvg
docker run -it openmvg /bin/sh
MVG 테스트해보기
테스트를 위해 다음 폴더에서 데모를 실행해 본다.
openMVG_Build/software/SfM/tutorial_demo.py
이 결과 다음과 같이 유럽식 건물을 180도 수평으로 이동하며 사진촬영한 이미지 11개를 다운로드 받아, SFM을 통해 카메라 위치를 생성하고, 특징점의 3차원 위치를 계산해 포인트 클라우드를 생성한다.

입력 사진

SFM 계산 과정
생성된 결과는 다음과 같이 특정 폴더에 PLY파일로 저장된다. 기타, 계산된 특징점 및 카메라 정보가 함께 저장된다.


저장된 포인트 클라우드 및 카메라 등 메타 정보

SFM 계산 결과

MeshLab / CloudCompare
이제 다음과 같이 실행해 본다.
python SfM_SequentialPipeline.py ./ImageDataset_SceauxCastle/images ./ImageDataset_SceauxCastle/Castle_Incremental_Reconstruction
그럼, 다음과 같은 계산 결과를 확인할 수 있다.

생성된 SFM 포인트 클라우드 결과물은 다음과 같다. Sparse Point Cloud로 생성된 결과를 확인할 수 있다.





밀집 포인트 클라우드 생성
밀집된 포인트 클라우드(dense point cloud reconstruction)를 생성하려면 OpenMVS를 사용한다. 관련해 다음 링크를 참고한다.
OpenMVS를 빌드하기 위해, 다음과 같이 소스코드를 다운로드 받고, 관련 패키지를 설치한 후, 빌드한다.
#Prepare and empty machine for building:
sudo apt-get update -qq && sudo apt-get install -qq
sudo apt-get -y install build-essential git mercurial cmake libpng-dev libjpeg-dev libtiff-dev libglu1-mesa-dev libxmu-dev libxi-dev
main_path=`pwd`
#Eigen (Required)
hg clone https://bitbucket.org/eigen/eigen#3.2
mkdir eigen_build && cd eigen_build
cmake . ../eigen
make && sudo make install
cd ..
#Boost (Required)
sudo apt-get -y install libboost-iostreams-dev libboost-program-options-dev libboost-system-dev libboost-serialization-dev
#OpenCV (Required)
sudo apt-get -y install libopencv-dev
#CGAL (Required)
sudo apt-get -y install libcgal-dev libcgal-qt5-dev
#VCGLib (Required)
git clone https://github.com/cdcseacave/VCG.git vcglib
#Ceres (Required)
sudo apt-get -y install libatlas-base-dev libsuitesparse-dev
git clone https://ceres-solver.googlesource.com/ceres-solver ceres-solver
mkdir ceres_build && cd ceres_build
cmake . ../ceres-solver/ -DMINIGLOG=ON -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF
make -j2 && sudo make install
cd ..
#GLFW3 (Optional)
sudo apt-get -y install freeglut3-dev libglew-dev libglfw3-dev
#OpenMVS. 다음 main_path는 현재 폴더가 설정되므로, 빌드 에러가 날 경우 적절히 수정해야 함.
git clone https://github.com/cdcseacave/openMVS.git openMVS
mkdir openMVS_build && cd openMVS_build
cmake . ../openMVS -DCMAKE_BUILD_TYPE=Release -DVCG_ROOT="$main_path/vcglib"
#If you want to use OpenMVS as shared library, add to the CMake command:
-DBUILD_SHARED_LIBS=ON
#Install OpenMVS library (optional):
make -j2 && sudo make install
이제 Sample 폴더를 다운로드 받는다.
git clone https://github.com/cdcseacave/openMVS_sample
이 링크를 참고하여 다음 명령을 실행해, 입력된 이미지가 처리된 밀집 포인트 클라우드를 생성한다.
python MvgMvs_Pipeline.py ./images ./output_mvgmvs
참고로, 그냥 MvgMvs_Pipeline.py 소스를 실행하면, 문법 에러가 발생한다. 문법 에러를 수정한 후 다음과 같이 경로등이 포함된 코드를 적절히 수정한다.
# Indicate the openMVG and openMVS binary directories
OPENMVG_BIN = "/usr/local/bin/"
OPENMVS_BIN = "/usr/local/bin/OpenMVS/"
# Indicate the openMVG camera sensor width directory
CAMERA_SENSOR_WIDTH_DIRECTORY = "/home/ktw/project/openMVG/src/openMVG/exif/sensor_width_database"



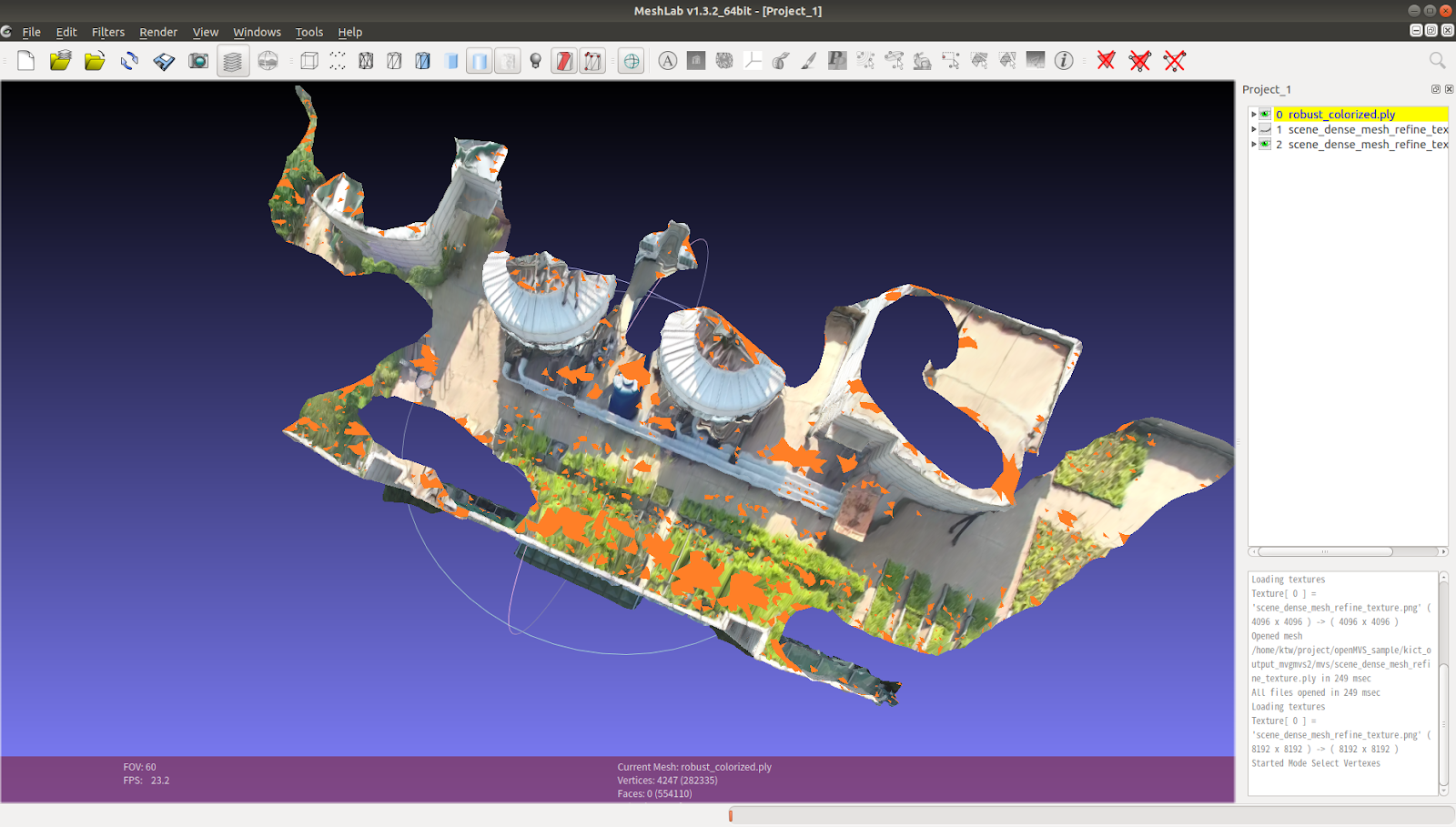
출력된 폴더에 ply은 meshlab이나 cloudcompare로 확인할 수 있다. 결과는 다음과 같다.






Dense Point Cloud 결과
SFM 처리 시 문제 해결
Focal length 이슈
카메라 focal 값은 카메라 종류별로 차이가 있다. sensor_width_database 파일에 해당 카메라가 등록되어 있지 않거나, 촬영된 이미지의 EXIF 메타 데이터가 없을 경우, SFM를 위한 정보를 제대로 계산하지 못한다. 이 경우, 다음과 같이 잘못된 포인트 클라우드가 생성된다.

누락된 포인트 클라우드
[ "Intrinsics analysis",
os.path.join(OPENMVG_BIN,"openMVG_main_SfMInit_ImageListing"),
["-i", "%input_dir%", "-f", "586.3", "-o", "%matches_dir%", "-d", "%camera_file_params%"] ],
앞의 -f 옵션은 단순히 focal length가 아닌 픽셀 단위의 focal length이다. 그래서, 다음과 같은 수식으로 계산해서 입력해야 한다.
- the EXIF focal length (pixels),
- the EXIF focal length (mm),
- the image of width and height (pixels),
- the known sensor width size (mm)
참고로, iPhone 8의 경우, focal 값은 다음과 같다.


이 경우, 계산된 focal length in pixel 값은 3351.6이다. 이 값을 앞의 -f 옵션값으로 하면 된다. 보통 고프로, 소니, 캐논 같은 유명 메이커 카메라는 sensor_width_database 에 등록되어 있어 -f 값을 안줘도 된다.
CUDA 메모리 할당 에러
과대한 포인트 클라우드 생성으로 다음과 같이 CUDA 메모리 할당 에러가 발생할 수 있다(MVG GPU issue, RefineMesh --use-cuda 0 option).

CUDA 메모리 할당 에러
이런 경우, 다음과 같이 use-cuda 옵션을 0으로 수정하면 된다.
[ "Refine the mesh",
os.path.join(OPENMVS_BIN,"RefineMesh"),
["scene_dense_mesh.mvs", "-w","%mvs_dir%", "--use-cuda", "0"]],
MvgMvs_Pipeline.py 파이썬 파일을 실행하면 특징들을 추출하고, 매칭 정보를 생성한 후, 밀집 포인트 클라우드를 생성하는 등의 프로세스를 진행한다.
다른 이미지 데이터를 테스트해 보기 위해, DJI 펜텀4 드론을 이용해 회사 전경을 7장 촬영해 다음과 같이 SFM 처리를 해 보았다.
python MvgMvs_Pipeline.py ./kict4 ./kict4_output
처리 시간은 수 분정도 밖에 걸리지 않았다. 결과는 다음과 같다.






7장 사진으로 생성된 포인트 클라우드 치고는 괜찬은 품질이다.
이제 회사 건물 앞면을 다음과 같이 아이폰8로 촬영하여, SFM을 처리해 보았다.

결과는 다음과 같다. 촬영 시 전체 건물이 보이지 않는 상태에서 근접 촬영한 이유로 품질이 좋지 않은 듯 하다.

회사 건물 뒷면도 다음과 같이 촬영해 SFM처리해 보았다.

결과는 다음과 같다. 오른쪽 부분에 구름다리가 있는 데, 이 부분은 제대로 나오지 않았고, 사진이 많이 오버랩되지 않고 적은 부분은 포인트 클라우드가 처리되지 않은 것을 알 수 있다.

실내 3차원 모델도 SFM으로 테스트해보았다. 집안의 테이블과 책꼿이를 중심으로 150도 범위로 사진이 중첩되게 촬영해 보았다. 촬영 기종은 Cannon 6D(5472x3648 pixel)이다.


결과는 다음과 같다. 실내에서 한정된 각도로 촬영한 사진임에도 불구하고 제대로 SFM처리되었음을 알 수 있다.


이제 상용 프로그램인 Pix4D와 비교를 위해, 몇 년전 DJI 펜텀3로 촬영한 회사 뒷편 플랜트 시설물 이미지 데이터를 이용해 다음과 같이 SFM을 처리해 보았다. 이미지 수는 70개가 넘는다.


입력 이미지 데이터
SFM 처리 과정은 다음과 같다.

본인의 경우, SFM처리에 대략 90분정도 시간이 걸렸다(i7-6700, GTX 960M, CUDA 사용). 밀집(dense) 포인트 클라우드가 생성되면 다음과 같이 출력폴더에 ply 파일이 생성된다.

밀집 포인트 클라우드는 바로 이전 단계에서 생성된 다음 같은 희소(sparse) 포인트 클라우드를 이용한다.


희소 포인트 클라우드









그림과 같이 출력된 결과 품질은 좋은 수준이다.
openMVG_main_openMVG2openMVS -i sfm_data.bin -o scene.mvs -d scene_undistorted_images
DensifyPointCloud scene.mvs
TextureMesh scene_dense_mesh_refine.mvs
직접 촬영한 이미지가 없어도 테스트 용으로 아래 링크에 촬영해 놓은 이미지 예제들을 제공한다. 테스트를 위해 다운로드 후 사용할 수 있다.SFM 도커 이미지 사용
도커가 설치되어 있다면, 앞에서 작업한 소스코드 빌드 등 복잡한 내용을 생략할 수 있다. 다음과 같이 Mappilary의 OpenSFM를 Docker에서 실행해 사용할 수도 있다.
sudo docker pull freakthemighty/opensfm
sudo docker images
sudo docker run -i -t -d -p 8080:8000 -v ~/project/docker:/mnt/common freakthemighty/opensfm /bin/bash
sudo docker ps -a

참고로, OpenSFM은 Open Drone Map에서도 사용된다.
주의사항
촬영한 이미지의 카메라 정보가 아래 파일에 포함되어 있지 않으면 에러가 발생할 수 있다. 이 경우, 관련 메타정보를 추가해 줘야 한다.
/openMVG/src/openMVG/exif/sensor_width_database
실행파일과 파이썬에서 실행할 때 디펜던시 문제로 버전 불일치 문제가 발생하는 경우가 있다. 특히, 아나콘다를 설치하고, 실행파일과 파이썬 실행 환경이 서로 다르게 링크될 때 문제가 발생할 수 있다.
Appendix - CGAL, BREAKPAD CMake error
Open CMakeLists.txt
OpenMVS_USE_BREAKPAD:BOOL=OFF
CGAL_DIR:PATH=/usr
좀 더 상세한 내용은 다음을 참고 한다.
- OpenMVG manual
- OpenMVG website
- Reconstructing 3D virtual environments within a collaborative e-infrastructure
- Emerging SFM, SLAM technology
- OpenMVG slide
- How to calculate focal length?
- Visual SFM
안녕하세요 https://bitbucket.org/eigen/eigen#3.2
답글삭제페이지가 없어졌는데 설치를 어떻게 해야할까요?
http://eigen.tuxfamily.org/index.php?title=Main_Page
삭제참고 바랍니다.
안녕하세요
답글삭제OpenMVG 깃허브에서 모듈을 다운받고 말씀해주신대로 진행했는데
make test에서
make: *** 타겟 'test'을(를) 만들 규칙이 없습니다. 멈춤.
이라는 error가 발생했는데 어떻게 해결해야 할까요 ?