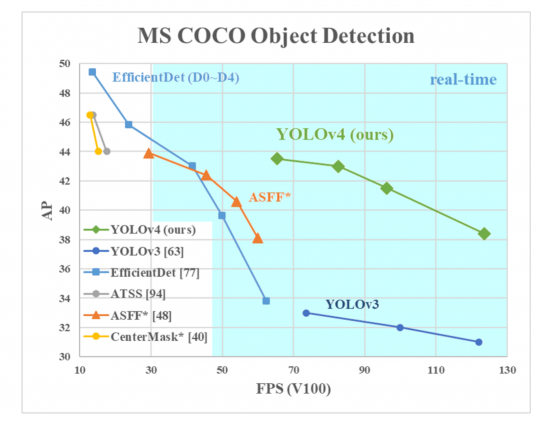
이 글은 우분투 20.04기반 YOLO v5 설치 및 사용 방법을 간단히 기술한다. YOLO v5는 PyTorch기반으로 동작하며, 기존 YOLO v3보다 객체 인식 속도 및 품질이 크게 개선되었다.
다음 순서로 개발 환경을 설치한다.
이제, 텐서플로우나 케라스 예제 코드가 쥬피터 노트북에서 제대로 실행되면 환경 설정 성공한 것이다.
이제 YOLO 설치 폴더에서 다음 명령을 입력한다.
다음과 같이 객체 인식 처리가 되면 성공한 것이다.
주요 코드를 분석해 본다. 동작은 다음과 같다.
import torch.distributed as dist #파이토치 임포트
import torch.nn as nn
...
from models.yolo import Model # 욜로 모델 임포트
def train(hyp, opt, device, tb_writer=None):
# 설정
if rank in [-1, 0]:
opt.hyp = hyp # 하이퍼 파라메터 추가
run_id = torch.load(weights).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
if wandb_logger.wandb:
weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
nc = 1 if opt.single_cls else int(data_dict['nc']) # 클래스 수
names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
# 모델 정의
pretrained = weights.endswith('.pt')
if pretrained:
with torch_distributed_zero_first(rank):
attempt_download(weights) # download if not found locally
ckpt = torch.load(weights, map_location=device) # 체크 모델 로드
model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
model.load_state_dict(state_dict, strict=False) # 모델 로딩
else:
model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
train_path = data_dict['train']
test_path = data_dict['val']
# 최적화
nbs = 64 # nominal batch size
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
if opt.adam: # 최적화 함수
optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
else:
optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
if opt.linear_lr:
lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
else:
lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
# plot_lr_scheduler(optimizer, scheduler, epochs)
# EMA
ema = ModelEMA(model) if rank in [-1, 0] else None
start_epoch, best_fitness = 0, 0.0
if pretrained:
# Epochs
start_epoch = ckpt['epoch'] + 1
if opt.resume:
assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
del ckpt, state_dict
# Image sizes
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
# 모델 파라메터
hyp['box'] *= 3. / nl # scale to layers
hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
hyp['label_smoothing'] = opt.label_smoothing
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
model.names = names
for epoch in range(start_epoch, epochs): # epoch
model.train() # 모델 훈련
for i, (imgs, targets, paths, _) in pbar: # 배치 -------------------------------------------------------------
ni = i + nb * epoch # number integrated batches (since train start)
imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
detect.py 주요 코드는 다음과 같다.
def detect(save_img=False):
source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
save_img = not opt.nosave and not source.endswith('.txt') # save inference images
webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
('rtsp://', 'rtmp://', 'http://', 'https://'))
# 초기화
device = select_device(opt.device)
half = device.type != 'cpu' # half precision only supported on CUDA
# 모델 로드
model = attempt_load(weights, map_location=device) # load FP32 model
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check img_size
# 클래스 이름 및 색상
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
# 예측 실행
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
t0 = time.time()
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
# Apply Classifier
if classify:
pred = apply_classifier(pred, modelc, img, im0s) # 객체 인식 예측
# 객체 탐지 프로세스
for i, det in enumerate(pred): # detections per image
p = Path(p) # to Path
save_path = str(save_dir / p.name) # img.jpg
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Stream results
if view_img:
cv2.imshow(str(p), im0)
cv2.waitKey(1) # 1 millisecond
if __name__ == '__main__':
parser = argparse.ArgumentParser() # 객체 탐지 예측 파라메터 정의
parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='data/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
print(opt)
check_requirements(exclude=('pycocotools', 'thop'))
with torch.no_grad():
if opt.update: # update all models (to fix SourceChangeWarning)
for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']: # 가중치에 따른 예측
detect()
strip_optimizer(opt.weights)
else:
detect()