이 글은 웹서버에서 프로세스 실행 완료하면 이메일 보내는 방법을 간략히 설명한다.

FEATURE(`no_default_msa')dnl
dnl DAEMON_OPTIONS(`Family=inet6, Name=MTA-v6, Port=smtp, Addr=::1')dnl
DAEMON_OPTIONS(`Family=inet, Name=MTA-v4, Port=smtp, Addr=0.0.0.0')dnl
dnl DAEMON_OPTIONS(`Family=inet6, Name=MSP-v6, Port=submission, M=Ea, Addr=::1')dnl
dnl DAEMON_OPTIONS(`Family=inet, Name=MSP-v4, Port=submission, M=Ea, Addr=0.0.0.0')dnl
$ sudo vi /etc/mail/access
$ telnet localhost 25
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
220 ubuntu ESMTP Sendmail 8.14.4/8.14.4/Debian-2ubuntu2.1; Fri, 10 Mar 2017 10:29:07 +0200; (No UCE/UBE) logging access from: localhost(OK)-localhost [127.0.0.1]

속도가 느리면 다음과 같이 설정한다. hostname은 hostnamectl 명령을 통해 얻는다.
$ sudo vi /etc/hosts

msg = MIMEText("Finished image capture")
msg["From"] = "pcdnet@tk"
msg["To"] = "laputa999@gmail.com"
msg["Subject"] = "Scan image capture"
p = Popen(["/usr/sbin/sendmail", "-t", "-oi"], stdin=PIPE)
p.communicate(msg.as_string())
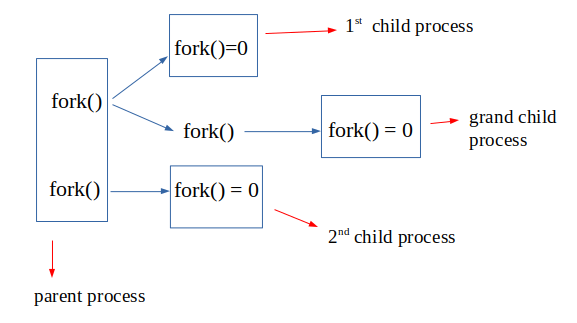
Appendix - 프로세스 호출
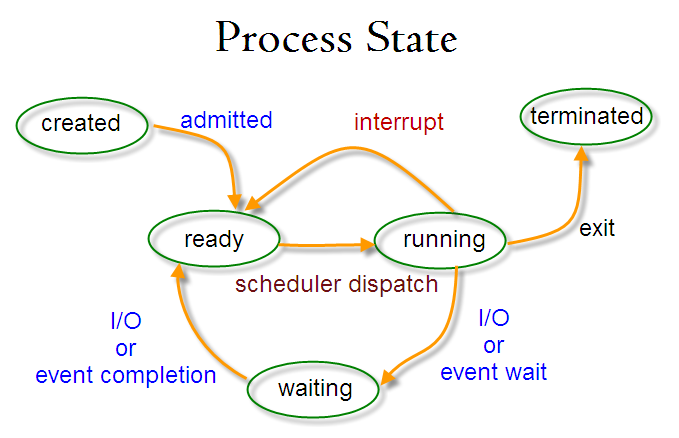
우선 웹서버에서 특정 이벤트가 발생했을 때, 이멜을 보낼려면 프로세스 호출에 대해 이해해야 한다. 프로세스 상태는 다음과 같다. 이때마다 시그널 콜백 함수를 이용해 이벤트를 받을 수 있다.

Appendix - 프로세스 시그널

import signal
import sys
def sigterm_handler(_signo, _stack_frame):
# Raises SystemExit(0):
sys.exit(0)
if sys.argv[1] == "handle_signal":
signal.signal(signal.SIGTERM, sigterm_handler)
try:
print "Hello"
i = 0
while True:
i += 1
print "Iteration #%i" % i
sleep(1)
finally:
print "Goodbye"
import time
class GracefulKiller:
kill_now = False
def __init__(self):
signal.signal(signal.SIGINT, self.exit_gracefully)
signal.signal(signal.SIGTERM, self.exit_gracefully)
def exit_gracefully(self,signum, frame):
self.kill_now = True
if __name__ == '__main__':
killer = GracefulKiller()
while not killer.kill_now:
time.sleep(1)
print("doing something in a loop ...")
print("End of the program. I was killed gracefully :)")
Appendix - 예제
이 예제는 roscore를 자동으로 실행하고, rostopic을 실행한 후 10초 뒤에 kill하는 프로그래이다.
import subprocess
from time import sleep, time
import os, signal
def proc_ros():
process = subprocess.Popen(['roscore'])
print('1. process', process.pid)
# process.wait(10)
sleep(10)
def proc_roslaunch():
process = subprocess.Popen(['roslaunch', 'rplidar_ros', 'rplidar.launch'])
print('2. process', process.pid)
#process.wait(10)
sleep(10)
def term_proc():
process = subprocess.Popen(['rostopic', 'echo', '/scan'])
print('3. process', process.pid)
sleep(10)
for i in range(10):
sleep(2)
process.kill()
print('Timed out - killing', process.pid)
def check_kill_process(pstring):
for line in os.popen("ps ax | grep " + pstring + " | grep -v grep"):
fields = line.split()
pid = fields[0]
os.kill(int(pid), signal.SIGKILL)
proc_ros();
proc_roslaunch();
term_proc()
sleep(10)
term_proc()
sleep(10)
print('End program')
레퍼런스
- How to send e-mail from Ubuntu server?
- Is there a program that can send me a notification e-mail when a process finishes?
- Linux: Send mail after a process id finishes or is killed
- How To Launch Child Processes in Node.js
- Run Python script from Node.js using child process spawn() method
- How to Kill Zombie Processes
- Kill process (github)
- Signal in RPi
- signal – Receive notification of asynchronous system events
- Handling Unix Signals in Python
- signal — Set handlers for asynchronous events
댓글 없음:
댓글 쓰기