1. 개요
드론을 기반으로 한 영상 취득 및 처리 어플리케이션은 이미 다양한 곳에서 응용되고 있다. 특히, 사람이 직접 하기 힘든 작업들을 드론이 대신 해 줄 수 있다는 장점이 많은 어필을 하고 있는 상황이다.
이런 배경에서, 사람이 직접 영상을 취득하기 어려운 높은 높이의 MEP(기계 설비) 정보를 획득하기 위해, 필요한 드론 기술을 파악하기 위해, 본 테스트를 진행해 보았다.
2. 개발 및 설정
드론은 3DR IRIS를 활용하였다. 영상은 GoPro 4를 사용하였으며, GoPro를 제어하기 위해, Tarot 짐벌을 부착하였다. 이와 관련된 개발 내용은 다음 링크와 같다.
- Arducopter기반 3D Robotics IRIS 드론과 Mission Planner 간 연결 / 설정 / 시운전 테스트
- DIY 드론 기반 카메라 원격 영상 촬영 방법
- 드론 고프로 영상 원격 전송 모니터 설정
- 드론 카메라 짐벌(gimbal) 마운팅 및 오작동 문제 해결
- 3DR X8+ 드론 기반 센서 데이터 원격 취득 테스트
- 드론/로버 기반 원격 센서 데이터 취득 시스템 개발 시 기술, 고려사항 및 드론 활용 시 한계

 GoPro 영상 취득 및 FPV 테스트
GoPro 영상 취득 및 FPV 테스트


3. 테스트
다음은 테스트 영상이다.
드론 기반 FPV(First Person View) 및 GoPro 영상 취득 테스트
다음은 드론으로 부터 취득한 영상들이다. 간격은 초당 3프레임으로 설정하여 테스트하였다.




 MEP 설비 이미지 취득 모습(한국건설기술연구원)
MEP 설비 이미지 취득 모습(한국건설기술연구원)
3. 3차원 이미지 스캔 데이터 획득
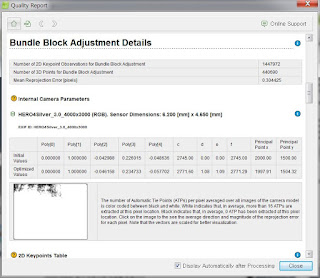
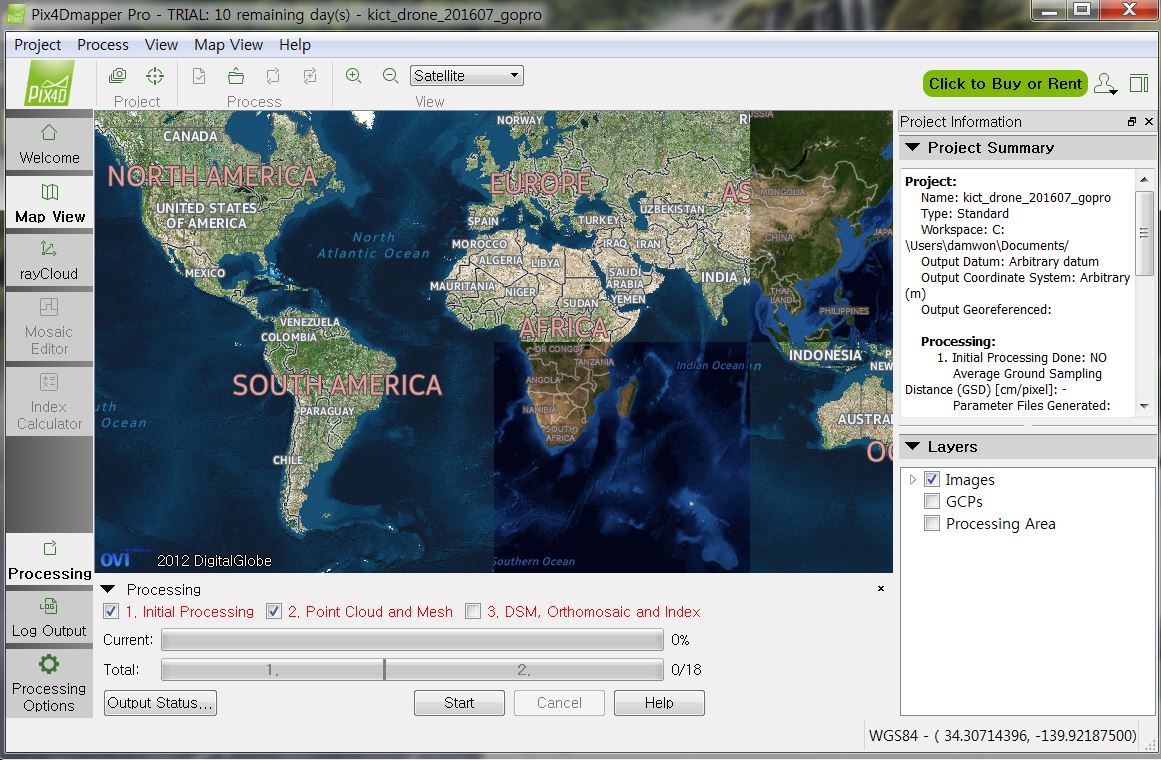
앞서 획득한 영상을 이용해, 3차원 이미지 스캔 데이터를 획득할 수 있다. 다음은 Pix4D를 이용해 GoPro 이미지 데이터를 3차원 포인트 클라우드로 변환한 과정이다. 참고로, Pix4D이외에 Context capture 등 상용 SW를 통해서도 이런 변환을 처리할 수 있으며, Visual SFM, Open Drone Map 등 오픈소스를 이용해서 3차원 포인트 클라우드를 획득할 수 있다.
1. 드론 촬영 이미지 입력

2. 좌표 시스템 설정

3. 모델 도메인 설정

4. 각 이미지에서 고유한 피처(feature. 특징점)를 추출하고, 서로 매칭함


5. 각 이미지 정합 결과 확인

6. 3차원 포인트 클라우드 생성


7. 3차원 포인트 클라우드 확인


앞의 결과물과 같이 큰 무리가 없이 3차원 포인트 클라우드를 획득할 수 있었다. 다만, 데이터 생성 시간이 LiDAR에 비해 오래 걸리고, GPS 정보가 없을 경우, 스케일을 별도로 맞춰줘야 하는 등의 문제가 있다. 참고로, 정밀도가 LiDAR에 비해 떨어져, 이에 부합하는 유스케이스를 적용하지 않으면 문제가 생길 수 있다.





앞서 획득한 영상을 이용해, 3차원 이미지 스캔 데이터를 획득할 수 있다. 다음은 Pix4D를 이용해 GoPro 이미지 데이터를 3차원 포인트 클라우드로 변환한 과정이다. 참고로, Pix4D이외에 Context capture 등 상용 SW를 통해서도 이런 변환을 처리할 수 있으며, Visual SFM, Open Drone Map 등 오픈소스를 이용해서 3차원 포인트 클라우드를 획득할 수 있다.
1. 드론 촬영 이미지 입력

2. 좌표 시스템 설정

3. 모델 도메인 설정

4. 각 이미지에서 고유한 피처(feature. 특징점)를 추출하고, 서로 매칭함

5. 각 이미지 정합 결과 확인


6. 3차원 포인트 클라우드 생성
{kind=link}
{kind=link}


7. 3차원 포인트 클라우드 확인


앞의 결과물과 같이 큰 무리가 없이 3차원 포인트 클라우드를 획득할 수 있었다. 다만, 데이터 생성 시간이 LiDAR에 비해 오래 걸리고, GPS 정보가 없을 경우, 스케일을 별도로 맞춰줘야 하는 등의 문제가 있다. 참고로, 정밀도가 LiDAR에 비해 떨어져, 이에 부합하는 유스케이스를 적용하지 않으면 문제가 생길 수 있다.
{kind=link}
댓글 없음:
댓글 쓰기