
실시간 SLAM(Simultaneous localization and mapping) 기반 3D 맵(LOAM)
모바일 SLAM 결과(한국건설기술연구원 일산 건물)
이 글에서 SLAM을 활용해 보기 위해서 저가의 VLP16 벨로다인 센서를 사용한다. 참고로, 이 방법은 우분투 ROS 환경에서 실행된다. 여기서 사용하는 환경은 ROS(Robot Operating System) melodic 버전을 사용하였으며, NVIDIA TX2, 오드로이드 우분투 18.04 기반으로 TEST 하였다(SLAM은 많은 계산시간이 필요하므로, NVIDIA TX와 같이 가능한 성능 좋은 컴퓨터를 사용하는 것이 좋다. 이 경우에는 장치 소형화를 위해 부득이하게 오드로이드를 사용했다). 우분투, 벨로다인 LiDAR 드라이버, ROS, RViz 설치 방법은 다음 링크를 참고하길 바란다.
SLAM 동작 방식
SLAM은 다음과 같은 단계로 스캔된 포인트 클라우드 장면(Scene)을 정합(registration)한다.
1. 각 장면 별 특징(feature) 계산
보통 각 장면에서 스캔된 데이터 PCD에는 불변인 특징점이 존재한다. 예를 들어, 특정 곡률을 가진 포인트, 평면 포인트 클라우드 등이 그것이다. 포인트 클라우드 스캔 특징이 있다면 이를 특징으로 사용하면 된다.

2. 각 장면 별 유사 특징 매칭
각 장면 별 유사한 특징을 서로 매칭한다. 서로 같은 최소 3개 특징을 찾아 매칭할 수 있으면 다음과 같은 매칭 좌표변환행렬 MCT를 만들 수 있다. 각 장면별 획득된 MCT는 Odometry 데이타를 포함한다.

각 장면의 매칭 좌표변환행렬을 얻으면, 이를 장면의 포인트 클라우드에 적용한다. 이로써 한 좌표계로 각 장면의 데이터가 정합된다. 이를 실시간으로 처리해야 하기 때문에 계산 성능이 좋은 장치를 사용해야 한다.


ICP 기반 정합 행렬 계산 알고리즘(Yun-Ting Wang etc, 2018)
이 글에서는 SLAM의 원리를 깊게 다루지는 않는다. SLAM의 이론적 설명은 다음 링크를 참고한다.
SLAM은 대부분 ROS 패키지를 사용하므로, 이전 글 참고해 미리 설치해 놓어야 한다. ROS에 대한 상세 설명은 아래 글을 참고 하길 바란다.
LOAM SLAM
우선 SLAM 에서 잘 알려진 LOAM(Laser Odometry and Mapping) 방식 SLAM을 만들어보자. 다음과 같이 github에서 소스코드를 받고, 순서대로 빌드해 본다(링크1, 링크2 참고).
$ cd ~/catkin_ws/src/
$ git clone https://github.com/laboshinl/loam_velodyne.git
$ cd ~/catkin_ws
$ catkin_make -DCMAKE_BUILD_TYPE=Release
$ source ~/catkin_ws/devel/setup.bash

참고로, 오드로이드, 라즈베리파이 같이 램 용량이 적은 컴퓨터에서는 컴파일 에러가 발생한다. 이 경우, 부록에 설명된 방법대로 스왑 용량을 설정해 컴파일 빌드하면 된다(컴파일이 몇시간 걸릴 수 있다).
이제 roscore를 실행하고, 다음 명령을 실행한다.
roslaunch loam_velodyne loam_velodyne.launch

실행된 ROS node 토픽(rqt_graph)
LOAM SLAM을 이용해 회사 사무실을 LiDAR로 스캔해 본 결과는 다음과 같다. 점군 밀도가 밀집되어 있는 벽체가 진하게 표시되어 구분되는 것을 확인할 수 있다.





SLAM 스캔 결과(건설연 본관 2동 3층)
점군이 모여있는 부분은 회사에 설치된 파티션이고, 그 외에 점들이 흩어져 있는 부분들은 천장 및 바닥이다. 파티션의 경계선은 뚜렷하게 표시된 맵이 생성되지만, 아직 좌표계, 캘리브레이션, IMU 등을 제대로 설정하지 않은 상황이라, SLAM 맵 정확도가 높지는 않아 보인다. 또한, 창쪽 유리가 반사되어 노이즈가 생기는 것을 확인할 수 있다.
SLAM 점군과 측량장비(GLM100C)와 측정값 간의 차이는 높이 2미터에서 1-0.5미터정도이다. 정확도는 좀 더 다양한 방법으로 확인할 필요가 있어보인다.
1차 SLAM 테스트
2차 SLAM 테스트
3차 SLAM 테스트(ODROID)
4차 SLAM 테스트(NVIDIA TX2로 테스트. IMU연결안함. SLAM 맵 깨지는 현상이 덜함)
참고로, VLP16의 스캔 수직범위는 크지 않아, 360도 스캔을 위해서는 스캐너를 회전시켜야 한다. 아래 영상은 LiDAR를 회전시켜 360도로 점군을 획득해 맵을 생성하는 예이다.
LOAM SLAM
SLAM 결과를 저장하려면 다음과 같이 토픽명을 지정하고 ROSBAG 명령어로 토픽 데이터를 저장하면 된다.
rosbag record -o out /laser_cloud_surround
만약, PCD 포맷으로 변환하려면, 아래 명령을 이용해 [input bag]에 저장된 .bag파일명을 지정해 준다.
rosrun pcl_ros bag_to_pcd [input bag] /laser_cloud_surround pcd
생성된 pcd파일은 다음과 같이 CloudCompare 프로그램으로 확인할 수 있다.



저장된 SLAM 정합 결과(CloudCompare)
참고로, 다음 명령을 이용해 미리 획득된 데이터를 플레이하거나 읽을 수 있다.
rosbag play ~/Downloads/velodyne.bag
roslaunch velodyne_pointcloud VLP16_points.launch pcap:="$HOME/Downloads/velodyne.pcap"
LOAM동작을 이해하기 위해 소스코드를 UML로 역설계한다.

LOAM SLAM UML
아울로 ROS NODE간 토픽 그래프를 RQT_GRAPH 명령을 이용해 확인해 본다.

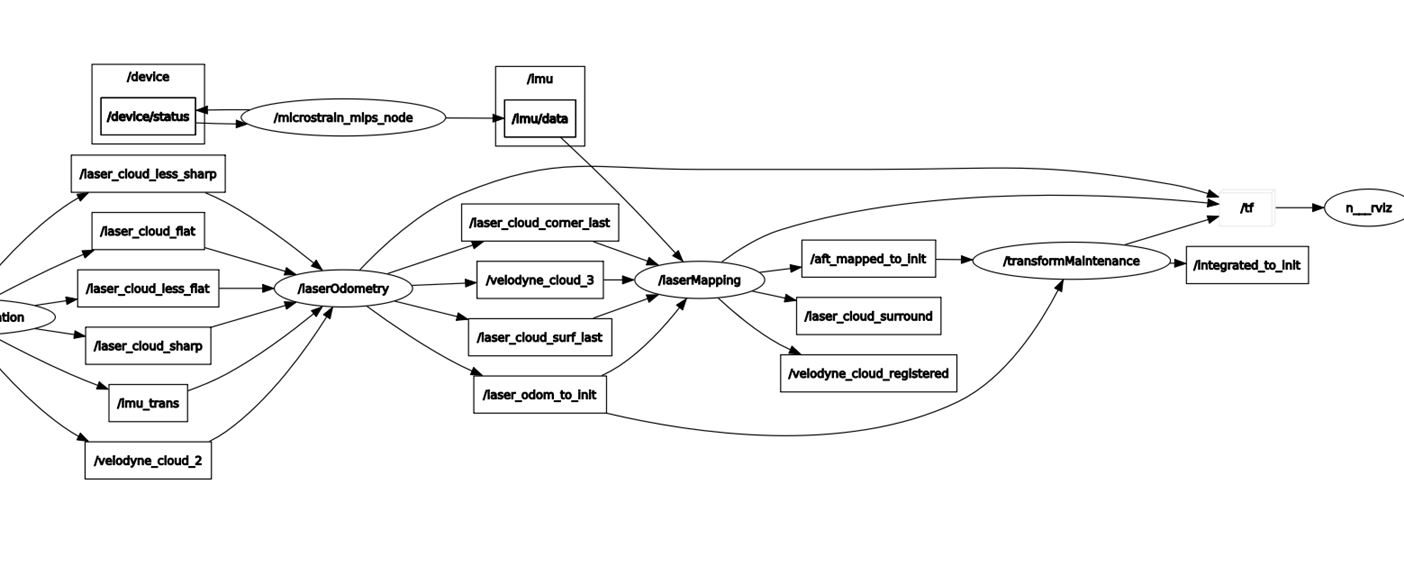
ROS NODE 토픽 그래프
구조와 소스코드를 분석해 보면 다음과 같은 순서로 SLAM데이터를 계산하고 있는 것을 알 수 있다.
1. velodyne node: 스캔 후 point cloud 데이터 획득
2. multi scan registration node: 스캔된 데이터에서 곡률 기반 특징점(모서리, 평면) 생성
3. laser odometry: 이전 스캔 데이터에서 생성된 특징점을 기반으로 현재 스캔 데이터의 매특징점과 비교해 주행괘적(odometry)을 계산
4. laser mapping: 주행괘적을 이용해 스캔 데이터를 보정해 정합함. 만약, IMU 센서가 있는 경우, /imu/data에서 얻은 데이터를 이용해 데이터 보정함
LOAM은 특징점 계산에 많은 계산 시간이 필요하다. 이런 이유로 원칙적으로 NVIDIA TX2 이상의 임베디드 보드가 필요하다. LeGO LOAM은 이 계산 시간을 좀 더 줄인것이다.
좀 더 자세한 내용은 관련 논문을 참고하길 바란다.
LeGO(lightweight and ground optimized lidar odometry and mapping) LOAM은 LOAM에 비해 계산 시간은 줄이고, 루프백(LOOP BACK)을 지원하여 SLAM 안전성을 높인 방법이다. Levenberg–Marquardt algorithm 을 이용해 해 계산 방법을 개선한다. 참고로 LM 알고리즘은 특정 함수에 적합한 커브를 피팅(curve fitting)할 때도 많이 사용된다.
LeGO LOAM 링크를 방문해, 다음과 같이 소스를 다운로드후 빌드를 준비한다. 참고로, LeGO LOAM을 빌드하기 전에 GTSAM(Georgia Tech Smoothing and Mapping library) 패키지를 미리 설치해 놓아야 한다.
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
다음과 같이 소스를 빌드한다.
cd ~/catkin_ws/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1

다음과 같이 ROS 패키지 실행해 보았다.
roslaunch lego_loam run.launch
참고로 lego 패키지의 노드 중 일부는 ROS의 시뮬레이션 time 을 이용한다. 이 기능은 ros::time 패키지에 있는 데, 이를 사용하는 노드의 ROS loop가 동작되지 않는 경우가 발생할 수 있다. 이 상황에는 실제 스캔된 포인트 클라우드 및 처리된 결과물을 rviz에서 확인할 수 없다. 이때는 해당 노드의 main() 함수 내에서 ROS loop가 실행되기 전에 다음과 같은 시간 초기화 함수를 호출해 빌드한 후 실행해 보면 잘 동작될 것이다.
ros::time::Init();
일부 TF(Transform coordinate Frame) 토픽이 동작되지 않는 문제가 있을 수 있다. 이 경우 센서 데이터 좌표계가 설정되지 않아 rviz에 스캔 데이터가 표시되지 않고 에러 메시지가 발생한다. 이 경우, lego_loam 의 run.launch 파일 내 TF 토픽 발생하는 노드를 터미널에서 강제로 실행하면 잘 동작된다.
문제가 없을 경우 LeGO SLAM 실행된 결과는 다음과 같다.

LeGO SLAM 실행 결과
github에 링크되어 있는 pcap파일로 실행하면 미리 스캔한 데이터로 다음과 같은 데모를 확인할 수 있다고 한다. 만약, 벨로다인에서 저장된 ROS bag 파일이 있다면, 다음 명령을 이용해 재생하여 rviz에 데이터를 표시할 수 있다. 참고로, LeGO 웹사이트에서 샘플 데이터 bag 파일을 다운로드 할 수 있다.
rosbag play *.bag --clock --topic /velodyne_points /imu/data
LeGO LOAM

HDL graph SLAM
HDL GRAPH SLAM
HDL 그래프 스램은 3차원 라이다를 이용한 슬램 기술 중 하나로 NDT(Normal Distributions Transformation) 스캔 매칭 및 루프 검출 방식을 알고리즘으로 사용한다. 이 방식은 다음 그림과 같이 odometry 예측, RANSAC을 이용한 바닥 검출 등을 이용해 스캔 데이터 매칭을 수행한다.

HDL 슬램을 수행하려면, 다음 링크를 방문해 소스코드를 다운로드 받고, 빌드해야 한다.
실행을 위해 필요한 패키지는 다음과 같이 설치한다.
HDL GRAPH SLAM 프로세스
HDL 슬램을 수행하려면, 다음 링크를 방문해 소스코드를 다운로드 받고, 빌드해야 한다.
# for indigo
sudo apt-get install ros-indigo-geodesy ros-indigo-pcl_ros ros-indigo-nmea-msgs
# for kinetic
sudo apt-get install ros-kinetic-geodesy ros-kinetic-pcl_ros ros-kinetic-nmea-msgs ros-kinetic-libg2o
# for melodic
sudo apt-get install ros-melodic-geodesy ros-melodic-pcl-ros ros-melodic-nmea-msgs ros-melodic-libg2o
sudo pip install ProgressBar2
컴파일은 ROS cakin으로 빌드한다. 만약 intel 계열 보드가 아니면 OpenMP 사용하는 소스코드에서 에러가 발생한다. ARM계열 보드의 경우, openmp 패키지를 설치하고, 에러 나는 소스 코드를 일부 수정해야 한다.
관련 에러를 수정한 후 벨로다인 노드와 슬램을 실행다면 다음과 같은 결과를 확인할 수 있다.


실내 SLAM 결과
깃허브에 포함된 예제를 보면, 다음과 같은 실행 결과를 확인할 수 있다.


HDL GRAPH SLAM 결과
NDT(Normal Distributions Transformation) SLAM
NDT는 SLAM에서 사용하는 기술 중 하나로 PCL(point cloud library)에 구현되어 있는 알고리즘이다.
PCL NDT 지원 클래스
이 방법을 실시간 SLAM에 직접 사용할 때는 계산 성능에 문제가 있어, OCTREE 등 공간 인덱싱 기법을 사용해 속도를 개선해 사용하는 기법을 적용한다.
다음은 PCL 및 공간 인덱싱을 사용한 버전의 소스이다.
이 중 공간 인덱싱 적용된 NDT 코드를 다운로드받고 ROS CATKIN으로 빌드해 보았다. 그리고 다음과 같이 실행해 보았다(각 폴더는 본인 환경에 맞게 변경하길 바란다).
rosrun ndt_omp align /home/nvidia/catkin_ws/src/ndt_omp/data/251370668.pcd /home/nvidia/catkin_ws/src/ndt_omp/data/251371071.pcd
그럼 다음과 같이 두개의 점군이 정합된 결과를 확인할 수 있다.

NDT 결과
참고로, NDT는 GICP(Generalized Iterative Closest Point) 방식의 하나이다.

GICP 결과(좌: 정합되지 않은 두개 점군. 우: 정합된 점군)(PCL)
부록: 오드로이드 cc1plus internal compile 에러 솔류션
오드로이드는 내부 램 용량이 작은 임베디드 컴퓨터이기 때문에 컴파일 시 cc1plus internal compile error 가 발생될 수 있다. 이 경우, 터미널에서 다음과 같이 설정한다.
dd if=/dev/zero of=/swapfile bs=1024 count=4194304
chown root.root /swapfile
chmod 0600 /swapfile
mkswap /swapfile
swapon /swapfile
설정된 스왑 디스크 크기를 확인해 본다.
free -m
이렇게 해도 안된다면, 컴파일 시 make -j 옵션 대신 make 를 사용한다(관련 링크).
참고로, 임베디드 장치는 메모리 크기가 2~4G이며 스왑은 구성되어 있지 않다. 이 경우, 컴파일 프로세스에서 g++: internal compiler error: Killed (program cc1plus) 오류가 발생한다. 이 오류는 메모리가 부족하여 발생하므로, 스왑을 추가하여 문제를 해결할 수 있다(링크 참고).
참고: NVIDIA TX2기반 테스트
ODROID보다 TX2기반에서 안정적인 SLAM 처리가 가능하다. ROS 특성상 컴퓨팅 처리 속도가 늦으면, 메시지 동기화가 문제가 되며, 이로 인해 SLAM 맵 생성이 제때 처리되지 않는 문제가 발생할 수 있다. 참고로 TX2는 보통 개발 보드와 함께 조립되어 있는 데, 다음과 같은 캐리어 보드를 이용하면, 손바닥 보다 작은 크기로 패키징 가능하다.
캐리어 보드

NVIDIA TX2와 개발보드
레퍼런스
- Yun-Ting Wang etc, 2018, A Single LiDAR-Based Feature Fusion Indoor Localization Algorithm, Sensors
- Velodyne ROS SLAM
- Ji Zhang, 2013, LOAM SLAM, Carnegie Mellon University(paper)
- LOAM velodyne, ROS.org
- Ji Zhang, 2013, NDT omp, Carnegie Mellon University
- ROS, ROS SLAM. GMapping
- Sebastian Hening, 2017, 3D LiDAR SLAM Integration with GPS/INS for UAVs in Urban GPS-Degraded Environments, ICP based SLAM
- Tixiao Shan, Brendan Englot, 2018, lightweight and ground optimized lidar odometry and mapping, LeGO LOAM
- Kenji Koide etc, 2019, A Portable 3D LIDAR-based System for Long-term and Wide-area People Behavior Measurement, Advanced Robotic Systems, HDL graph SLAM
- B(erkeley) L(ocalization) A(nd) M(apping), 2016, BLAM SLAM
- Christoph Schütte, 2019, CARTOGRAPHER SLAM, google.com
- Raul Mur-Artal, 2017, ORB-SLAM2
- VeloView, 2017, VeloView: LiDAR SLAM capabilities with LOAM
- Pierre Guilbert, 2019, Point-cloud processing using VeloView: Automatic LiDAR-IMU Calibration and Object Recognition, kitware
- Rihards Gailums, 2016, HACKATHON: Journey to creating Drivenet Maps - Open Data real-time road maps for Autonomous Driving from 3D LiDAR point clouds
- Surfel-based Mapping using 3D Laser Range Data
- Advanced implementation of LOAM
- NDT based LiDAR SLAM 3D
- 3D Lidar Inertial Odometry and Mapping (LIO-mapping)
- SLAM-capable robot using the RoboPeak LIDAR sensor
- VeloSLAM
- SLAM system that employs 2D and 3D LIDAR measurements
- Ceros Solver, google
기타 임베디드 보드에서 소스코드 빌드하며 에러가 발생할 때 구글링해 도움받은 레퍼런스는 아래와 같다.
- C++: INTERNAL COMPILER ERROR: KILLED (PROGRAM CC1PLUS)
- internal compile error: Killed (program cc1plus), Bolog(odroid cc1plus "c++: internal compiler error")
- ODROID-XU3/XU4
- OpenMP on Ubuntu
- cmake error with tx2(arm) #2
- How to add -fpermissive option to kdevelop?
- CMakeLists.txt 주요 명령과 변수 정리
- github
- Build Error (Jetson TX1 - ARM64): c++: error: unrecognized command line option '-msse' #479
loam slam 에서 normal vector topic 를 발행하는지 혹시 아시나요?
답글삭제rostopic list 해 보면 /imu_trans 관련 토픽 발행하는 것 확인할 수 있습니다. 별도 normal vector topic 발행은 보이지 않습니다. 앞의 rqt_graph 캡쳐 화면 참고하시길 바랍니다.
삭제/imu_trans 를 언급해주셨는데, /imu_trans topic 를 이용하여 normal vector 를 추정하는 방법이 있는건가요?
삭제IMU 이용한 normal vector estimation 은 아래 링크 등 참고하시길 바라니다.
삭제https://www.researchgate.net/post/How_can_we_measure_the_direction_of_movement_using_an_IMU
내용 업데이트 감사드려요. scanner 회전을 적용 중인데요.. 동영상처럼 잘 안되네요.. scanner 가 회전하면 rviz 에서 base 가 같이 회전을 합니다. 혹시 조언해주실 부분이 있으실지 문의드립니다.
답글삭제SLAM 어느 알고리즘으로 테스트 해 보셨나요?
삭제LOAM SLAM 다운 및 빌드 완료하고
답글삭제roslaunch loam_velodyne loam_velodyne.launch 실행했는데 rviz 상에서 아무것도 보이지 않습니다ㅠ
혹시 저의 ros 버전이 kinetic이라 그런걸까요?
ros 버전과는 관련 없어요. rostopic 에서 echo로 velodyne topic 이나 loam 토픽이 제대로 출력되는 지 부터 하나씩 확인해 가면 원인 찾을 수 있을 겁니다. rviz 설정에 pointcloud2 제대로 표시되는지 확인하시고, 좌표 프레임웍도 에러 없는 지 rviz error등도 있는 지 확인하셔야 해요.
삭제rostopic echo로 토픽 출력 확인해보니 해결할 수 있었습니다!
삭제답변 감사드립니다!
안녕하세요! 글을 작성해주셔서 감사합니다. 몇가지 물어볼께 있어서 글을남깁니다.
답글삭제제가 사용중인 환경은 이렇습니다.
OS : ubuntu 18.04
embedded board : jertson Tx2 board + j120 carrier board
ROS version : melodic
package : HDL GRAPH SLAM
HDL GRAPH SLAM를 빌드중에 발생한 에러를 어떻게 수정하셨는지 알 수 있을까요?
아래 부록에 사용된 프로그램의 gcc 링커부분을 수정하면 되는건가요?
답글 늦게 보았네요. 링크 에러는 gcc 옵션 수정했고, 컴파일에러는 옵션 수정으로 해결 못하면 소스 편집했어요.
삭제안녕하세요! slam관련해서 구글링을 하다가 우연히 이 글을 보게 되었습니다.
답글삭제유익한 글 정말 감사합니다.
제가 loam slam할 때 lidar로만 하면 rviz상에서 포인트가 계속 튀어서 imu를 결합하고 싶은데 어떻게 두 센서를 결합했는지 궁금합니다.
제가 사용하는 라이다는 velodyne vlp16이고 imu는 MW-AHRSv1을 사용합니다.
혹시 실례가 안된다면 가르쳐 주실수 있나요?
그리고 loam slam을 통해 맵을 그렸는데 저장할땐 rosbag을 이용하나요?
리플 늦게 보고 지금 글 답니다. 우선 저장은 rosbag 사용했어요. 정합된 포인트 튀는 것은 slam 패키지마다 옵션 config가 있어요. 그걸 slam환경에 맞게 조정했습니다. imu는 imu topic이 이미 ros에서 표준화되어 있어요. imu 제조사에서 ros package를 제공해 주면 그걸 사용해 launch하면 되고, 아니면 직접 만드셔야 합니다. 참고로, ros에 imu topic data 검색하시면 포맷 나와 있어요.
삭제안녕하십니까? Daddy Maker 분의 slam을 보고 많은 감탄을 하였습니다. 저는 현재 imu와 vlp16과의 결합을 성공하였습니다. rqt_graph에서 확인할 수 있었습니다. 그러나 rviz 화면에서는 point cloud 값이 계속 튀는 현상이 나타납니다. 이 문제를 어떻게 해결할 수 있을지 알려주시면 감사드리겠습니다.
답글삭제댓글 늦게 보았네요. 보통 slam이 빈번하게 튀지는 않습니다. 주변 스캔 환경의 변화가 심한 곳인가요? 좀 더 넓은 복도나 바닥이 잘 보이는 곳에서 시도 바랍니다. 참고로, imu는 튀는 현상에서 보완되는 정도지, 반듯이 slam 품질에 좋은 영향을 미치지는 않는 것 같습니다.
삭제How can I deal with this error after recording the /laser_cloud_surround topic, It doesn't publish any topic when rosbag play [recorded bag file]. Also, cannot transform bag to pcd i think the main problem is there isn't any responses about /laser_cloud_surround
답글삭제Did you check error log related to the topic? If there is problem, check it step by step like below.
삭제1. check hardware setting and config including vlp-16
2. check ros environment
3. check ros topic graph using rqt_graph when you run vlp-16 and slam node.
In addition, refer to
https://daddynkidsmakers.blogspot.com/2019/06/odroid-veloview-ros.html
loam slam을 HDL-32으로 시도해보았는데 [multiScanRegistration-1] process has died가 계속 뜨네요... (현재 18.04 melodic사용하고있습니다) topic echo로 확인해보아도 어떤 토픽도 나오지 않네요 ㅠㅠ pcl1.7 버전에서 이런 오류가 발생할수 있다고는 하는데 pcl버전도 1.8 최신버전입니다.그리고 hdl-32의 기본 튜토리얼로 point_cloud가 잘 나오는건 확인해서 기계차체의 이상은 아니라고 생각합니다. 혹시 이런경우도 있으셨는지요 ...
답글삭제기본적인 것 부터 테스트해 보십시요. ROS TOPIC에서 POINT CLOUD 잘 나오는 지 부터 확인해보시고, 이후 ROS GRAPH확인하여 토픽 메시지가 제대로 해당 노드에 전달되는 지 확인해 보십시요. 참고로, 좌표계 프레임이 안맞아도 동작 제대로 안됩니다.
삭제작성자가 댓글을 삭제했습니다.
삭제안녕하세요 libpcl 을 source 다운받아서 빌드해야 정상 실행됩니다.
삭제(자동설치, 또는 sudo apt-get 방식이 아닌 소스 코드 빌드해서 설치해야 1.8 이상. 정상실행되더라고요 .저도 같은 문제를 겪었네요 )
저도 똑같은 상황인데 저는 VLP16 같은 라이다를 사용하고 있습니다. 기본 벨로다인 드라이버에서 pointcloud 확인하고 Legoloam을 팔로우업하고 있는데 rostopic echo를 하니까 출력이 제대로 안나오네요 따로 노드끼리 매치업을 해줘야하나요?
삭제slam 관련 구글링 하다가 들어왔는데 정말 유익한 정보 감사합니다!
답글삭제넵
삭제작성자가 댓글을 삭제했습니다.
답글삭제아직까지 확인을 하실런지 모르겠네요
답글삭제요즘 벨로다인 라이더 2개의 화면을 정합하는 작업을 하고 있습니다.
PCL 에서 제공하는 라이브러리를 이용해 좌표계를 일치시켜 보았는데
결과가 이상해서 블로그에서 소개하신 공간인덱싱을 활용한 패키지를 다운받아
결과를 확인해 보니 이 또한 제가 작성한 결과와 큰 차이가 없더라구요
두개의 라이더 사이에 가림막을 두고 하나의 화면으로 합치는 것이 목표인데
정합된 화면은 한쪽 화면과 거의 유사합니다.
혹시 이유를 알 수 있을까요?
아니면 혹시 도움이 될만한 문서에 대한 정보라도 알 수 있을지요?
정합 방법은 다양합니다. 사용하신 방법에 따라 문제 해결 방법이 다를 것 같습니다. 일반적으로 라이더 2개에서 얻은 점군은 좌표계가 서로 다르므로, 서로 일치하는 작업을 수동으로 하거나, 자동으로 하게 될겁니다. 자동으로 하려면, 각 점군에서 기준점과 방향에 대한 정보가 있어야, 이 정보를 얻어서 정합을 위한 좌표변환행렬을 만들 수 있습니다.
삭제안녕하십니까!! velodyne에 관심이 생겨서 이것저것 공부하고 있는 학생입니다.
답글삭제본문의 rqt_graph에서처럼 velodyne_nodelet_manager 노드에서 velodyne_packets와 velodyne_points만 남기고 사용하지 않는 토픽들은 다 없애주고 싶은데 어떻게 해야 하는지 궁금합니다.
topic publish하는 노드 실행을 멈추면 되겠죠. 단, 다른 노드가 사용하는 topic이면 전체가 동작하지 않을 수 있습니다.
삭제안녕하세요,
답글삭제LOAM SLAM 다운 및 빌드 완료하고
roslaunch loam_velodyne loam_velodyne.launch 실행했을때까지는 rviz가 문제 없이 실행되는데 터미널에서 새 창을 열어 rosbag play를 하면 multiScanregistrarion-1 process has died 라는 에러가 지속적으로 발생합니다... 혹시 해결할 수 있는 방법을 알려주실 수 있을까요 감사합니다
rosbag이 저장되었는 데, rosbag play가 안된다면, 다른 노트북에서 rosbag play 해보시길 바랍니다. 다른 곳에서도 안되면 bag 데이터가 제대로 저장되지 않은 가능성이 크며, 그곳에서 잘 되면, ros 저장한 개발환경에 문제가 있을 확률이 큼니다.
삭제추가적으로 rosbag파일로 저장되어 있는 예시파일 말고 올려주신 Loam 영상과 같이 라이다를 통한 실시간 매핑을 하려면 어떻게 해야하는지 알려주실 수 있을까요?
답글삭제적혀있는 대로, loam 빌드하고, ros에서 맵핑하면, 큰 이슈는 없이 SLAM 처리됩니다. 이런 SLAM 알고리즘은 이미 GITHUB 등에 공개되어 있는 것이라, 미리 사용하는 패키지 등 잘 설치하고, 중간에 있을 수 있는 빌드 에러 수정하면, 큰 문제 없으 동작될 것입니다. 최근 좀 더 성능 좋은 GPS+IMU+LIDAR 센서 퓨전 기반 SLAM도 릴리즈되어 있으니 참고 바랍니다.
삭제