이 글은 자바스크립트(Javascript)와 C++ 연동 방법에 대한 내용을 간략히 공유한다. 가끔, 플러그인 등을 개발할 때, 외부 스크립트 코드와 연동해야할 경우가 있다. 이와 관련해, 필요한 내용이 무엇인지 알아본다.

자바스크립트 내부 구조

아래는 C++에서 자바스크립트를 호출하는 방법을 보여준다.
#include "quickjspp.hpp"
#include <iostream>
class MyClass
{
public:
MyClass() {}
MyClass(std::vector<int>) {}
double member_variable = 5.5;
std::string member_function(const std::string& s) { return "Hello, " + s; }
};
void println(qjs::rest<std::string> args) {
for (auto const & arg : args) std::cout << arg << " ";
std::cout << "\n";
}
int main()
{
qjs::Runtime runtime;
qjs::Context context(runtime);
try
{
// C++클래스 정의
auto& module = context.addModule("MyModule");
module.function<&println>("println");
module.class_<MyClass>("MyClass")
.constructor<>()
.constructor<std::vector<int>>("MyClassA")
.fun<&MyClass::member_variable>("member_variable")
.fun<&MyClass::member_function>("member_function");
// 자바스크립트 모듈 임포트
context.eval(R"xxx(
import * as my from 'MyModule';
globalThis.my = my;
)xxx", "<import>", JS_EVAL_TYPE_MODULE);
// 자바스크립트 코드 호출 및 실행.
// C++에서 정의된 클래스를 자바스크립트에서 생성, 호출할 수 있다.
context.eval(R"xxx(
let v1 = new my.MyClass();
v1.member_variable = 1;
let v2 = new my.MyClassA([1,2,3]);
function my_callback(str) {
my.println("at callback:", v2.member_function(str));
}
)xxx");
// callback
auto cb = (std::function<void(const std::string&)>) context.eval("my_callback");
cb("world");
}
catch(qjs::exception)
{
auto exc = context.getException();
std::cerr << (std::string) exc << std::endl;
if((bool) exc["stack"])
std::cerr << (std::string) exc["stack"] << std::endl;
return 1;
}
}
이 코드 실행을 위해서는 quickjspp 라이브러리가 필요하다. 아래 링크를 참고해 설치하고, 실행하면 된다.
- How JavaScript works: Event loop and the rise of Async programming + 5 ways to better coding with async/await
- Getting started with embedding V8
- Node.js v18.1.0 documentation
- V7: Embedded JavaScript engine
- Using JavaScript in Your C++ Applications
- mJS: Restricted JavaScript engine
- node-embed
- quickjspp
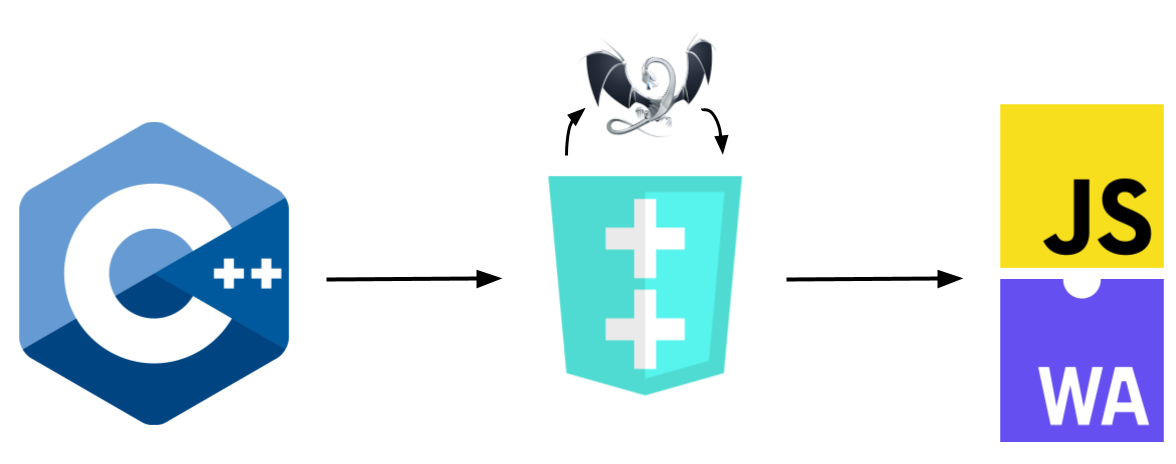
- compile C++ to WebAssembly plus JavaScript